[텍스트 마이닝] 3. Machine Learning 2
비선형 특성(Non-linear features)
p6. 선형 예측기와 비선형 특성
- 질문(Q): 선형 분류기를 사용하여 원형인 결정 경계를 얻을 수 있을까?
네! (Yes!)
주의: ‘선형(linear)’은 가중치 벡터와 예측값 사이의 관계를 의미한다. (입력 $x$가 아님)
p7. 선형 예측기에서의 특성
- 선형 모델의 경우, 가설 클래스는 특성 추출기(feature extractor) $\varphi(x)$의 선택에 의해 결정된다.
따라서, 특성 설계는 데이터에서 의미 있는 관계를 포착하는 데 매우 중요하다.
현실 세계 데이터에서의 비선형성(non-linearity)의 어려움:
- 비단조성(non-monotonicity): 특성과 목표 변수 간의 관계는 항상 단조적으로 증가하거나 감소하지 않는다.
- 포화(saturation): 일부 특성은 특정 지점을 넘어가면 효과가 줄어든다.
- 특성 간 상호작용(interactions between features): 하나의 특성의 영향은 다른 특성의 존재에 따라 달라질 수 있으며, 이는 선형 모델이 자연스럽게 포착할 수 없다.
가설 클래스(hypothesis class)란
모델이 학습 과정에서 선택할 수 있는 함수들의 집합을 의미한다.
즉, “어떤 모양의 함수들 중에서 최적의 것을 찾을 것인가”를 미리 정해 놓은 틀이다.예시:
선형 회귀:
\[\mathcal{F} = \{ f_{\mathbf{w}}(x) = \mathbf{w} \cdot x \}\]입력 $x$ 에 대해 직선(또는 초평면) 형태의 함수만 고려한다.
비선형 특성 변환:
\[\mathcal{F} = \{ f_{\mathbf{w}}(x) = \mathbf{w} \cdot \varphi(x) \}\]$\varphi(x)$ 를 통해 다항식, 곡선, 원형 경계 등 더 복잡한 형태를 포함할 수 있다.
즉, 가설 클래스는
- 모델이 어떤 함수 형태를 학습할 수 있는가,
- 문제를 어떤 방식으로 수학적으로 표현할 것인가
를 결정하는 모델의 표현력 범위라 할 수 있다.
p8. 선형 예측기의 특징
- 예: 건강 예측하기
- 입력(Input): 환자 정보 $x$
- 출력(Output): 건강 $y \in \mathbb{R}$ (값이 클수록 더 좋음)
의료 진단을 위한 특징들: 키, 몸무게, 체온, 혈압 등
- 직접적인 접근법(straightforward approach) 은 이 특징들을 입력으로 직접 사용하는 것임:
- 그러나, 이 접근법은 한계가 있으며, 우리는 다음에서 이를 살펴볼 것임.
p9. 비단조성(Non-monotonicity)
- 도전 과제: 특징들과 목표 변수 사이의 관계는 항상 단조적으로 증가하거나 감소하지 않는다.
- 직접적인 접근법:
- 문제: 모델은 극단적인 값을 선호하지만, 실제 관계는 비단조적이다.
- 시도: 이차 특징(quadratic features) 도입
- 단점: 이 접근법은 수동으로 도메인 특화(domain-specific) 변환을 정의해야 한다.
p10. 비단조성(Non-monotonicity)
- 더 나은 접근법:
결합할 수 있는 간단한 구성 요소(building blocks)로 특징을 설계한다.
- 새로운 가설 클래스(hypothesis class)는 이전 것을 포괄하면서도 개념적으로 더 유연하다.
💡 여기서 $w_1, w_2, w_3$는 사용자가 직접 정하는 값이 아니라,
학습 과정(training) 을 통해 데이터로부터 자동으로 추정된다.
- 일반적인 규칙:
복잡한 특징을 직접 설계하는 대신, 먼저 원하는 함수 형태를 고려한 후
그것을 간단한 구성 요소(building blocks)로 분해한다.
p11. 포화(Saturation)
문제점: 일부 특징들은 일정 지점을 넘어서면 효과가 감소한다.
- 예시: 제품 추천
- 입력: 제품 정보 $x$
- 출력: 관련성 $y \in \mathbb{R}$
- 특징 $N(x)$: 제품 $x$를 구매한 사람 수
- 직접적인 접근법:
- 문제: 1000명이 구매한 제품에 비해 10000명이 구매한 제품이 정말로 10배의 관련성을 갖는가?
- 그렇지 않다! 인기는 포화될 수 있으며, 추가적인 구매는 인지된 관련성에 덜 기여할 수 있다.
p12. 포화(Saturation)의 개선 방법
- 더 나은 접근법들:
로그 변환(Logarithmic transformation)
\[\varphi(x) = [1, \log N(x)], \quad y = w_1 + w_2 \log N(x)\]- 값의 범위(dynamic range)가 매우 클 때 좋은 아이디어가 될 수 있다.
이산화(Discretization, binning)
\[\varphi(x) = [1, \; 1[0 < N(x) \leq 10], \; 1[10 < N(x) \leq 50], \; \dots, \; 1[500 < N(x) \leq 1000]]\] \[y = w_1 + w_2 \; 1[0 < N(x) \leq 10] + \cdots + w_6 \; 1[500 < N(x) \leq 1000]\]- $N(x)$는 미리 정의된 구간(bin)으로 나누어진다.
- 각 구간마다 다른 가중치를 학습할 수 있어, 구간별로 상이한 영향을 반영할 수 있다.
p13. 특성들 간의 상호작용
- 예시: 건강 예측
- 입력: 환자 정보 $x$
- 출력: 건강 $y \in \mathbb{R}$ (높을수록 더 좋음)
- 두 특징을 고려: 키(height)와 몸무게(weight).
건강한 몸무게 범위는 명확히 키에 의존한다.
- 직접적인 접근법: 이 관계를 포착할 수 없다.
- 더 나은 접근법: 여러 상호작용 항을 포함하는 특징들을 추가
- $BMI = \dfrac{weight(kg)}{height(m)^2}$
- 도메인 지식(domain knowledge)이 반영될 수 있다.
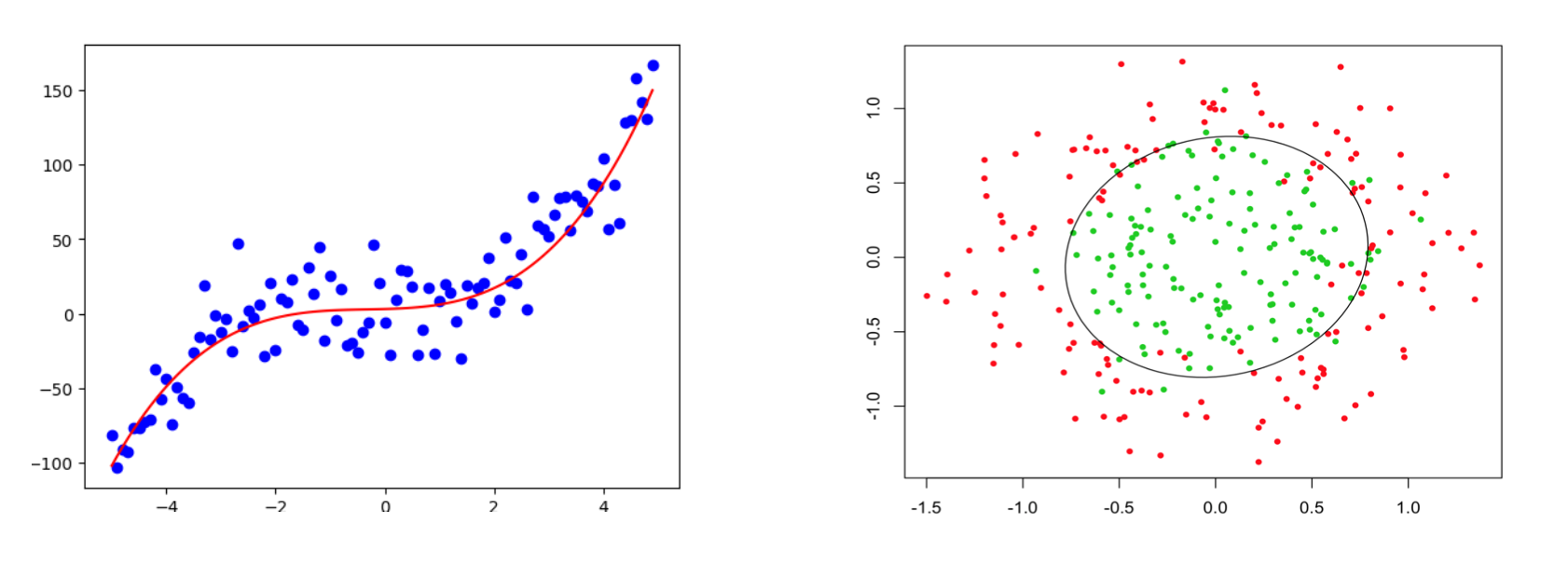
p14. 비선형 특성 설계: 회귀
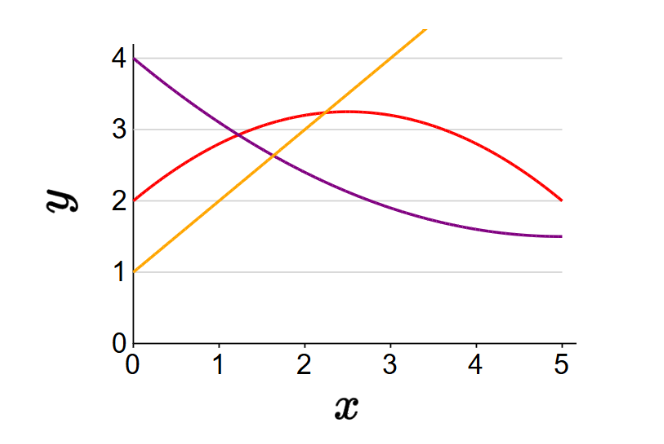
- 이차 특성(Quadratic features)
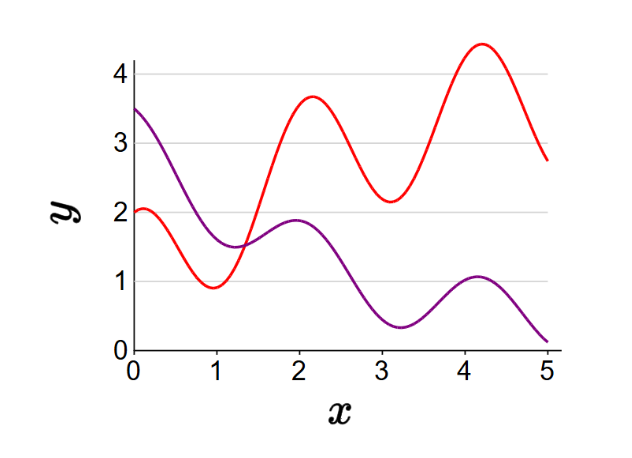
- 주기성 특성(Periodicity features)
1. 이차 특성의 예시 전개
특성 벡터:
\(\varphi(x) = [1, x, x^2]\)첫 번째 경우:
\(f(x) = [2, 1, -0.2] \cdot [1, x, x^2] = 2 + x - 0.2x^2\)두 번째 경우:
\(f(x) = [4, -1, 0.1] \cdot [1, x, x^2] = 4 - x + 0.1x^2\)세 번째 경우:
\(f(x) = [1, 1, 0] \cdot [1, x, x^2] = 1 + x\)2. 주기성 특성의 예시 전개
특성 벡터:
\(\varphi(x) = [1, x, x^2, \cos(3x)]\)첫 번째 경우:
\(f(x) = [1, 1, -0.1, 1] \cdot [1, x, x^2, \cos(3x)] = 1 + x - 0.1x^2 + \cos(3x)\)두 번째 경우:
\(f(x) = [3, -1, 0.1, 0.5] \cdot [1, x, x^2, \cos(3x)] = 3 - x + 0.1x^2 + 0.5\cos(3x)\)
p15. 비선형 특성 설계: 분류
- 이차 특성(Quadratic features)
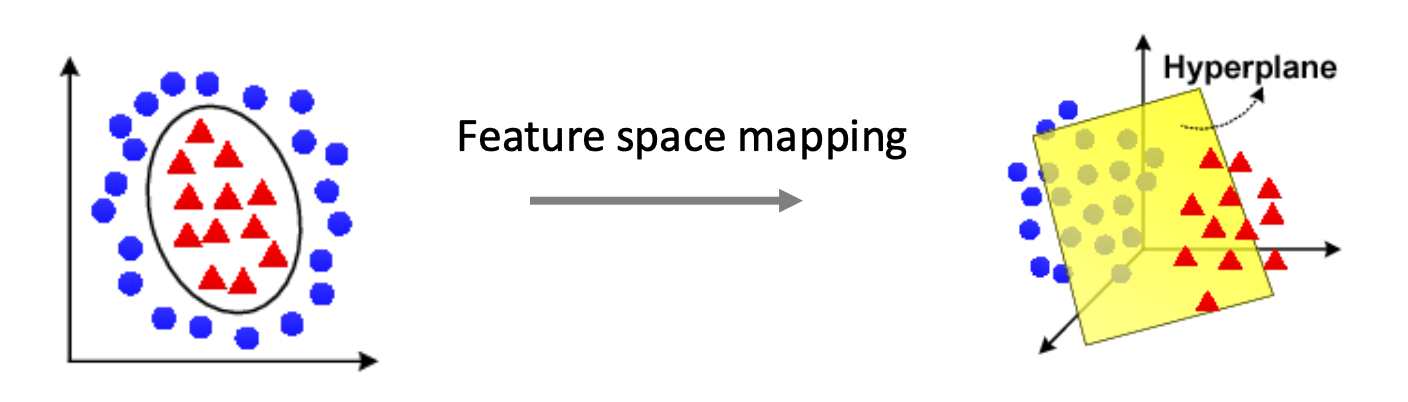
- 등가적 표현(Equivalently):
- 원래 입력 공간에서, 결정 경계(decision boundary)는 원(circle) 이다.
- 변환된 특성 공간에서는, 결정 경계가 초평면(hyperplane) 이 된다.
1. 원래 공간에서의 결정 경계
입력이 $(x_1, x_2)$일 때 결정 함수는
\[f(x) = 2x_1 + 2x_2 - (x_1^2 + x_2^2)\]이다.
$f(x) = 0$ 으로 두면
\[(x_1 - 1)^2 + (x_2 - 1)^2 = 2\]가 되어, 원래의 공간에서는 원의 형태가 결정 경계가 된다.
2. 변환된 공간에서의 표현
특성 벡터를
\[\varphi(x) = [x_1, x_2, x_1^2 + x_2^2]\]로 정의한다.
새로운 좌표 $(z_1, z_2, z_3)$ 를
\[z_1 = x_1,\quad z_2 = x_2,\quad z_3 = x_1^2 + x_2^2\]라고 두면, 결정 함수는
\[f(x) = [2, 2, -1] \cdot \varphi(x) = 2z_1 + 2z_2 - z_3\]로 표현된다.
3. 초평면으로 단순화되는 이유
결정 경계 $f(x)=0$ 은
\[2z_1 + 2z_2 - z_3 = 0\]의 형태가 된다.
이는 $(z_1, z_2, z_3)$ 공간에서의 평면 방정식이므로,
변환된 공간에서는 단순한 선형 초평면이 된다.
p16. 선형 예측기와 비선형 특성
무엇에 대해 선형인가?
예측은 점수(score)에 의해 결정된다: \(\mathbf{w} \cdot \varphi(x) = \sum_{j=1}^d w_j \varphi(x)_j\)
- $\mathbf{w}$에 대해 선형인가? → 예 (Yes)
- $\varphi(x)$에 대해 선형인가? → 예 (Yes)
- $x$에 대해 선형인가? → 아니오 (No!)
($x$는 반드시 벡터일 필요조차 없다)
- 요약 (Summary):
- 선형 예측기 $f_{\mathbf{w}}(x)$는 비선형 함수(non-linear functions)를 모델링할 수 있으며,
$x$에 대한 비선형 결정 경계(non-linear decision boundaries)를 만들 수 있다. - 점수(score) $\mathbf{w} \cdot \varphi(x)$는
$\mathbf{w}$에 대한 선형 함수(linear function)이므로 효율적인 학습이 가능하다. - 선형 예측기(linear predictors)는 도메인 지식(domain knowledge)에
기반한 잘 설계된 특성과 결합될 때 여전히 매우 효과적이다.
신경망(Neural networks)
p18. 비선형 예측기
- 선형 예측기
- 비선형 특성을 가진 선형 예측기
- $\varphi(x)$를 바꾸어 비선형 함수를 모델링할 수 있다.
- 비선형 신경망
- $\varphi(x)$를 사람이 직접 설계하는 대신, 신경망을 이용해 복잡한 변환(complex transformations)을 자동으로 학습할 수 있다.
최적의 transformation을 직접 디자인하는 것은 어려움
$\sigma(\mathbf{V}\varphi(x))$는 transformation을 자동으로 찾는 과정
p19. 동기 부여 예시
- 예시: 자동차 충돌 예측 (car collision prediction)
입력: 마주 오는 두 자동차의 위치
\[x = [x_1, x_2]\]출력: 안전(safe) 여부 또는 충돌(collide) 여부
\[y = +1 \; \text{(안전)}, \quad y = -1 \; \text{(충돌)}\]
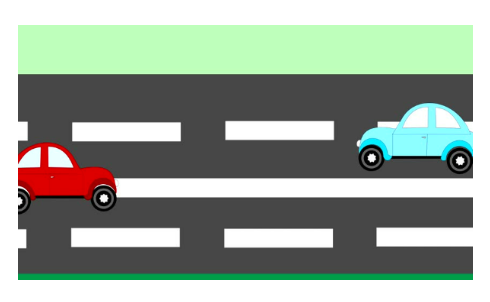
- 참 함수(true function)를 가정:
- 두 자동차가 충분히 멀리 떨어져 있으면(거리 ≥ 1) 안전하다.
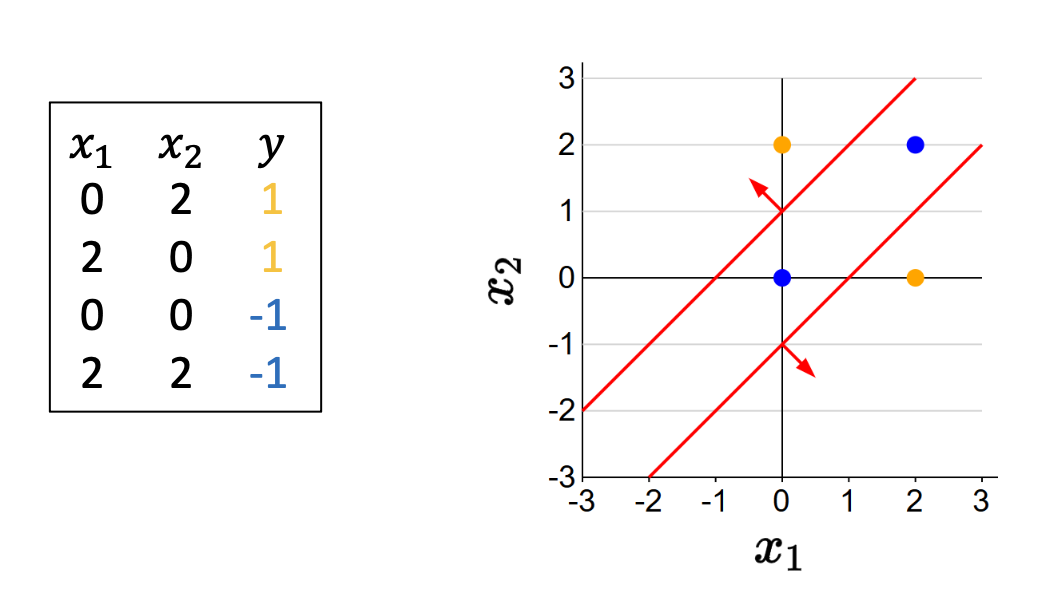
p20. 문제를 분해하기
신경망을 이해하는 한 가지 방법은(뇌를 예로 들지 않고도) 문제 분해(problem decomposition) 이다.
[하위 문제 1] 자동차 1이 자동차 2의 오른쪽에 충분히 멀리 있는지 확인:
\[h_1(x) = 1[x_1 - x_2 \geq 1]\][하위 문제 2] 자동차 2가 자동차 1의 오른쪽에 충분히 멀리 있는지 확인:
\[h_2(x) = 1[x_2 - x_1 \geq 1]\]
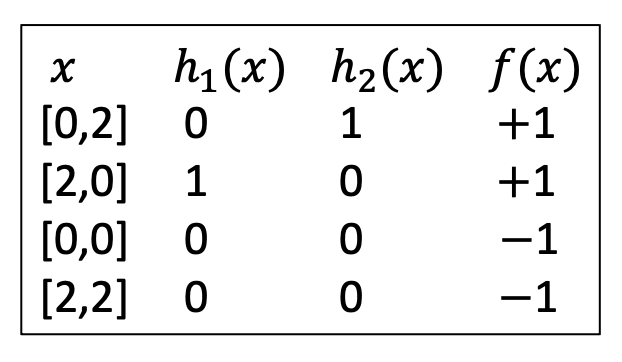
[예측] 둘 중 하나라도 참이면 안전(safe):
\[f(x) = \text{sign}(h_1(x) + h_2(x))\]
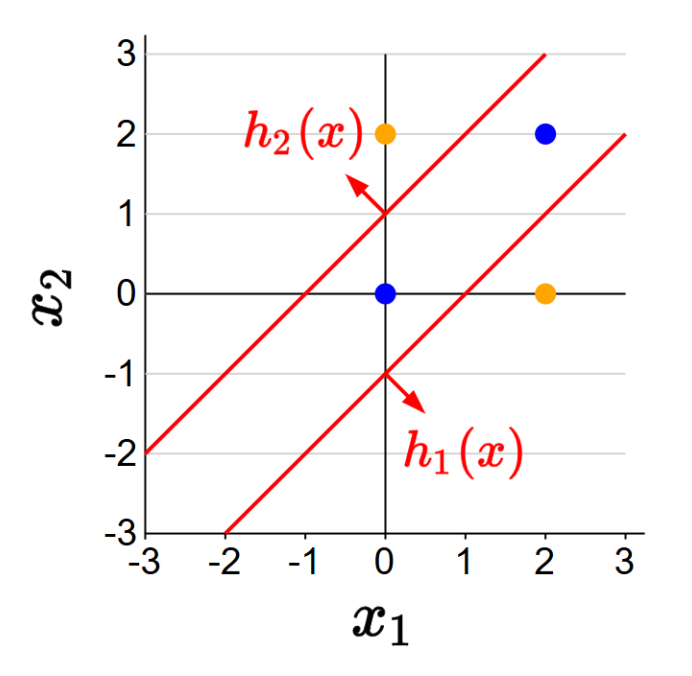
p21. 벡터 표기를 사용한 재작성
특성 벡터:
\[\varphi(x) = [1, x_1, x_2]\]중간 하위 문제들:
$1[\text{조건}]$ 는 조건이 참이면 1, 거짓이면 0을 반환하는 Indicator 함수이다.
- 최종 예측:
- $\varphi(x)$가 주어졌을 때 우리의 목표는 아래 2개를 학습하는 것이다
- 숨겨진 하위 문제들 $\mathbf{V} = (\mathbf{v}_1, \mathbf{v}_2)$
- 결합 가중치 $\mathbf{w} = [w_1, w_2]$
p22. Zero 그래디언트 피하기
우리는 학습을 위해 경사하강법(gradient descent)을 사용하지만, 중요한 문제가 발생한다:
\[h(x) = 1[\mathbf{v} \cdot \varphi(x) \geq 0]\]에서는 $\mathbf{v}$에 대한 $h(x)$의 그래디언트가 거의 모든 구간에서 0이 된다.
- 해결책:
- 0이 아닌 그래디언트를 보장하기 위해 매끄러운 활성화 함수(smooth activation function) $\sigma$로 대체한다.
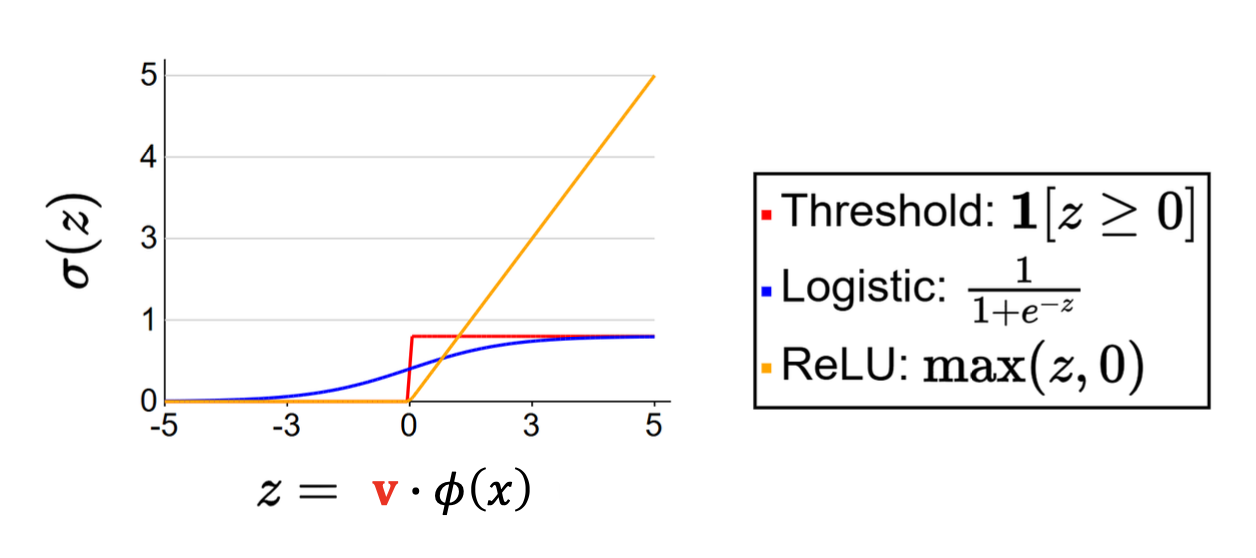
- $\sigma$로 주로 활용되는 함수들
Threshold:
\[1[z \geq 0]\]Logistic (Sigmoid):
\[\frac{1}{1+e^{-z}}\]ReLU (rectified linear unit):
\[\max(z, 0)\]기타 변형들: Leaky ReLU, ELU, SELU, GELU 등
1. Indicator 함수의 불연속성
- 함수 $h(x) = 1[\mathbf{v} \cdot \varphi(x) \ge 0]$ 은
$\mathbf{v} \cdot \varphi(x)$ 가 0을 기준으로 값이 갑자기 0에서 1로 바뀌는 불연속 함수이다.- 대부분의 영역에서는 값이 일정하게 유지되고, 기준점에서만 점프(discontinuity)가 발생한다.
2. 거의 모든 구간에서 그래디언트가 0인 이유
- 함수 값이 일정한 구간에서는 변화율이 없으므로 그래디언트가 0이다.
- 오직 $\mathbf{v} \cdot \varphi(x) = 0$ 인 경계점에서만 값이 불연속적으로 변할 뿐,
그 외의 거의 모든 지점에서 그래디언트는 0이다.3. 학습 과정에서의 문제
- 경사하강법은 그래디언트를 이용해 매개변수 $\mathbf{v}$ 를 갱신한다.
- 그러나 그래디언트가 0이면 매개변수가 더 이상 업데이트되지 않아 학습이 멈추게 된다.
- 따라서 매끄러운 활성화 함수(smooth activation function)를 사용하여
비제로(non-zero) 그래디언트를 확보하는 방식으로 문제를 해결한다.
p23. 신경망 (Neural networks)
- 이제 우리는 2-계층(two-layer) 신경망을 정의할 준비가 되었다:
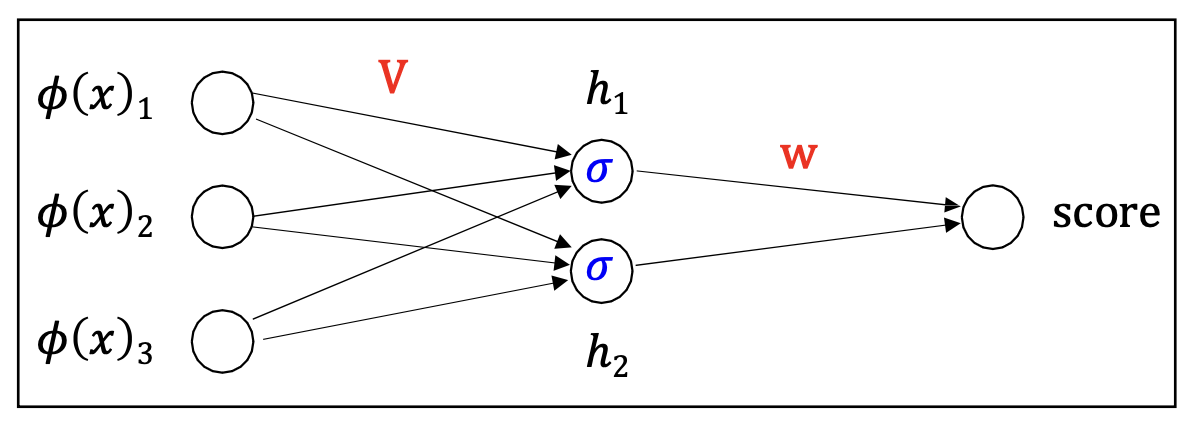
중간(hidden) 유닛들:
\[h_j = \sigma(\mathbf{v}_j \cdot \varphi(x))\]출력(Output):
\[\text{score} = \mathbf{w} \cdot \mathbf{h}\]- 표기
- $\mathbf{V}$ : 첫 번째 계층(first layer)의 가중치
- $\mathbf{w}$ : 두 번째 계층(second layer)의 가중치
- Key insight:
- 중간(hidden) 유닛들은 선형 예측기(linear predictor) 의 학습된 특징(learned features)으로 작동한다.
1. 학습된 특징(learned features)의 의미
- 전통적인 선형 예측기는 사람이 직접 설계한 특성(feature design)에 의존한다.
- 그러나 신경망의 중간(hidden) 유닛들은 학습 과정에서 데이터로부터 유용한 패턴을 자동으로 추출한다.
- 따라서 이 유닛들은 스스로 학습된 특징(learned features) 로 해석될 수 있다.
2. 선형 예측기와의 관계
최종 출력은 여전히 선형 결합
\[\text{score} = \mathbf{w} \cdot \mathbf{h}\]의 형태를 따른다.
하지만 입력 $x$ 자체가 아니라, 중간 유닛들이 생성한 변환된 표현 $\mathbf{h}$ 에 대해 선형 결합을 수행한다는 점에서
단순 선형 모델보다 훨씬 복잡한 관계를 표현할 수 있다.3. 신경망에서의 입력 처리
- 신경망에서는 $\varphi(x)$ 와 같은 별도의 특성 설계를 하지 않고, 주어진 입력을 그대로 사용한다.
- 복잡한 특징 변환은 네트워크 내부의 계층과 활성화 함수에 의해 자동으로 이루어지며,
이는 사람이 일일이 feature design 을 하지 않아도 된다는 장점을 제공한다.
p24. 신경망에서의 특성 학습
중간(hidden) 유닛들은 선형 예측기의 학습된 특성으로 작동한다.
선형 모델:
- 점수(score)는 주어진 특성 $\varphi(x)$의 선형 결합으로 계산된다.
- 선형 예측기는 사람이 직접 지정한 특성 $\varphi(x)$에 적용된다.
신경망:
- 입력 $\varphi(x)$는 은닉층(hidden layer)을 거쳐 새로운 표현 $h(x)$로 변환된다.
- 점수(score)는 이 학습된 표현을 기반으로 계산된다.
선형 예측기는 사람이 지정한 특성이 아니라, 자동으로 학습된 특성
\[h(x) = [h_1(x), \dots, h_k(x)]\]에 적용된다.
p25. 심층 신경망
우리는 이러한 개념들을 확장하여 더 깊은 신경망을 구축할 수 있다.
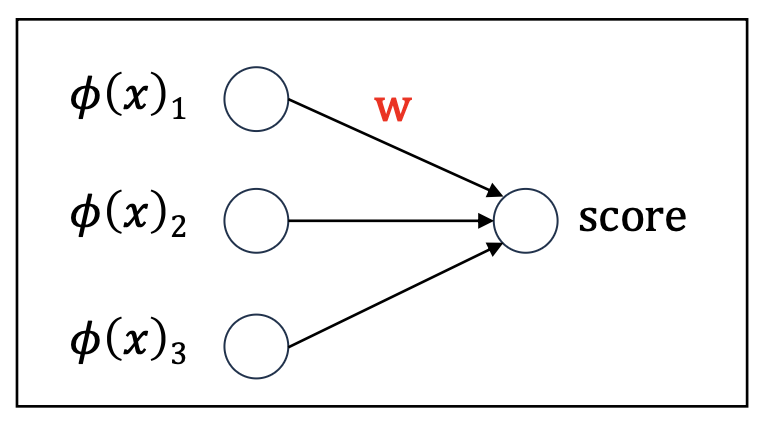
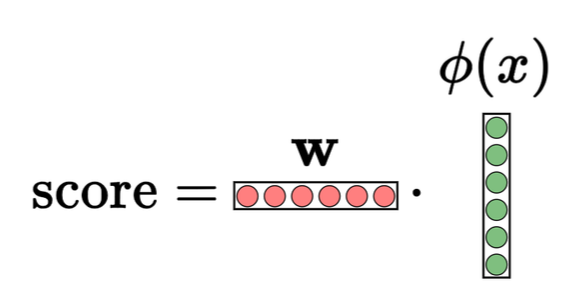
1-계층 신경망 (선형 예측기, linear predictor):
\(\text{score} = \mathbf{w} \cdot \varphi(x)\)
- 은닉층(hidden layer)의 수: 0
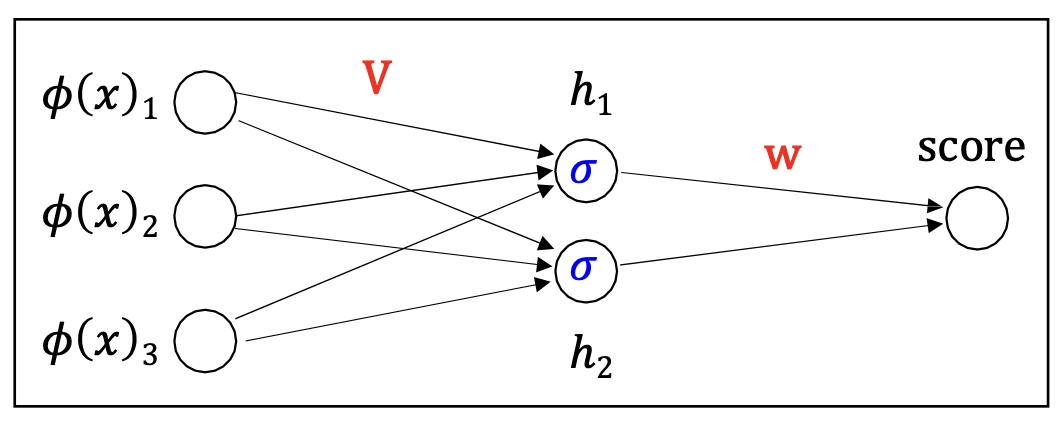
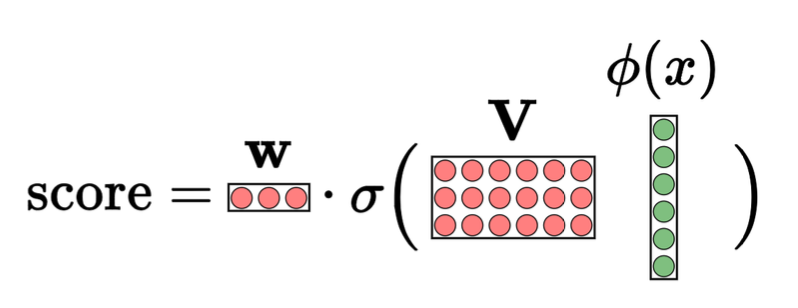
2-계층 신경망:
\(\text{score} = \mathbf{w} \cdot \sigma(\mathbf{V} \varphi(x))\)
- 은닉층의 수: 1
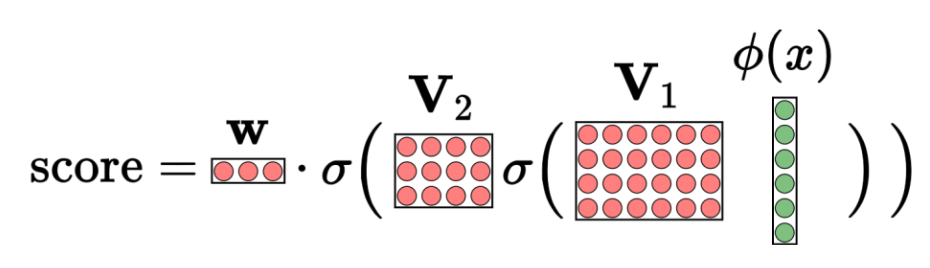
3-계층 신경망:
\(\text{score} = \mathbf{w} \cdot \sigma(\mathbf{V}_2 \, \sigma(\mathbf{V}_1 \varphi(x)))\)
- 은닉층의 수: 2
1-계층 신경망 (선형 예측기)
계산 과정:
\(\text{score} = \mathbf{w} \cdot \varphi(x)\)의미:
- 입력 $\varphi(x)$ 를 가중치 벡터 $\mathbf{w}$ 와 단순히 선형 결합한 값이다.
- 은닉층이 없으므로 비선형 변환은 일어나지 않는다.
- 기본적인 선형 모델에 해당한다.
2. 2-계층 신경망
- 계산 과정:
은닉층 계산:
\[h = \sigma(\mathbf{V} \varphi(x))\]
- $\mathbf{V}$ : 입력을 은닉 유닛으로 변환하는 가중치 행렬
- $\sigma$ : 비선형 활성화 함수 (sigmoid, ReLU 등)
출력 계산:
\[\text{score} = \mathbf{w} \cdot h\]- 의미:
- $\mathbf{V}$ 와 $\sigma$ 에 의해 입력이 비선형적으로 변환된다.
- 변환된 표현 $h$ 는 사람이 설계하지 않은 학습된 특성으로 해석할 수 있다.
- $\mathbf{w}$ 는 이 학습된 특성들을 다시 선형 결합하여 최종 출력을 만든다.
3. 3-계층 신경망
- 계산 과정:
첫 번째 은닉층:
\[h^{(1)} = \sigma(\mathbf{V}_1 \varphi(x))\]두 번째 은닉층:
\[h^{(2)} = \sigma(\mathbf{V}_2 h^{(1)})\]출력 계산:
\[\text{score} = \mathbf{w} \cdot h^{(2)}\]- 의미:
- 입력 $\varphi(x)$ 가 여러 번의 비선형 변환을 거치며 점점 더 복잡한 특성으로 추출된다.
- $\mathbf{V}_1, \mathbf{V}_2$ 는 각 층에서 입력을 새로운 표현으로 바꾸는 가중치 행렬이다.
- $\sigma$ 는 각 층에 비선형성을 부여해 단순 선형 모델이 표현할 수 없는 복잡한 패턴을 학습하게 한다.
- 마지막에 $\mathbf{w}$ 가 이 최종 표현을 결합해 예측을 만든다.
p26. 왜 더 깊게 가는가?
- 더 깊은 신경망은 단순한 특성들의 조합을 더 복잡한 패턴으로 확장할 수 있으며,
이는 더 나은 일반화(generalization)로 이어질 수 있다.
- 원시 픽셀 (입력)
- 원시 입력은 픽셀 값들로 구성된다.

⬇️
- 1번째 계층
- 하위 계층은 단순한 패턴을 감지한다.
- 예: 에지(edges)
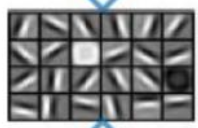
⬇️
- 2번째 계층
- 에지들의 조합이 곡선, 질감, 그리고 객체의 부분을 형성한다.
- 예: 눈, 코, 입

⬇️
- 3번째 계층
- 더 높은 계층에서는 뉴런이 전체 객체에 반응한다.
- 예: 얼굴 전체
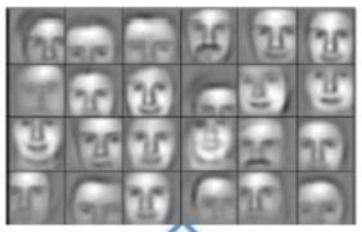
점점 더 추상적이고 고수준의 특성을 표현할 수 있다
p27. 왜 더 깊게 가는가?
원칙적으로, 하나의 은닉층(one hidden layer) 을 가진 신경망은 어떤 함수도 근사할 수 있다.
✔ 보편 근사 정리(Universal approximation theorem) [1]
- $\mathbb{R}^d$ 위의 임의의 연속 함수는, 유한한 수의 노드와 비선형 활성화 함수를 포함하는 하나의 은닉층 신경망에 의해 임의의 정밀도로 근사될 수 있다.
그러나, 층의 크기(layer size) 가 비현실적으로 커져야 하므로 학습이 매우 느려진다.
- 더 깊은 신경망은 얕고 넓은 신경망과 동일한 함수들을 표현할 수 있다.
- 하지만 더 적은 매개변수(parameters) 로 가능하며, 이는 더 나은 일반화(generalization)로 이어질 수 있다.
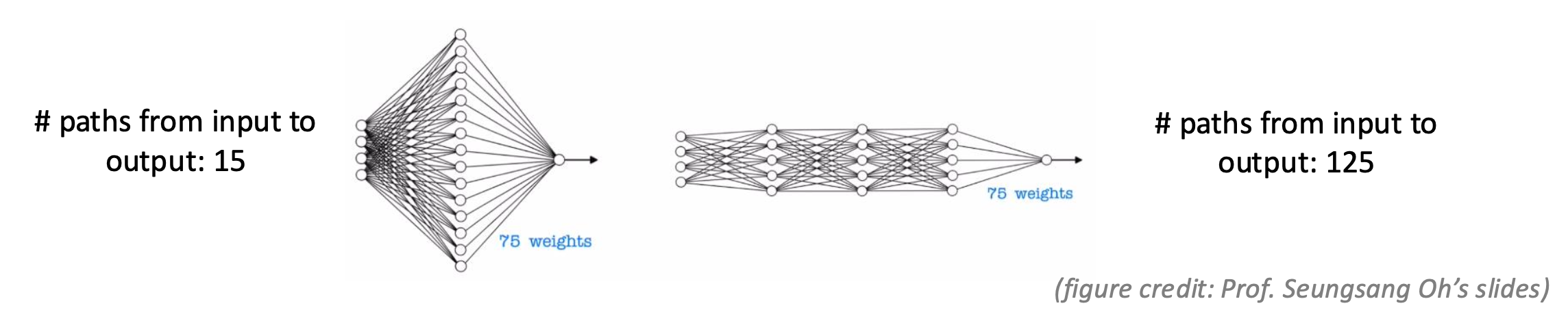
1. 1개 은닉층 신경망 (총 75개 가중치)
- 입력 노드 = 4
- 은닉 노드 = 15
- 각 은닉 노드 = 입력 4개 + bias 1개 = 5
- 총 가중치 수 = $15 \times 5 = 75$
2. 3개 은닉층 신경망 (총 75개 가중치)
- 첫 번째 은닉층 (bias 포함)
- 입력 = 4
- 각 노드 = 입력 4개 + bias 1개 = 5
- 가중치 수 = $5 \times 5 = 25$
- 두 번째 은닉층 (bias 제외)
- 입력 = 첫 번째 은닉층 출력 5개
- 각 노드 = 입력 5개
- 가중치 수 = $5 \times 5 = 25$
- 세 번째 은닉층 (bias 제외)
- 입력 = 두 번째 은닉층 출력 5개
- 각 노드 = 입력 5개
- 가중치 수 = $5 \times 5 = 25$
- 총합 = $25 + 25 + 25 = 75$
3. 경로 수 비교 (입력 1개 기준)
- 1개 은닉층 신경망
- 입력 1개가 은닉층 15개 노드로 연결됨
- 각 노드에서 바로 출력으로 연결
- 경로 수 = $15$
- 3개 은닉층 신경망
- 입력 1개 → 첫 번째 은닉층 5개 노드
- 첫 번째 은닉층 5개 → 두 번째 은닉층 5개
- 두 번째 은닉층 5개 → 세 번째 은닉층 5개
- 최종적으로 출력과 연결
- 경로 수 = $5 \times 5 \times 5 = 125$
4. 의미
- 두 구조 모두 총 가중치 수는 $75$ 개이지만,
- 3층 구조는 더 많은 경로(125)를 가져
같은 가중치 수로도 더 복잡한 표현을 학습할 수 있다.
역전파(Backpropagation)
p29. 동기: 신경망을 이용한 손실 최소화
이제 다음 단계는 신경망을 학습(train) 하는 것이다.
예시로, 4계층 신경망(four-layer neural networks) 에서의 회귀 손실을 생각해보자:
- 경사하강법(gradient descent)을 적용하기 위해서는, 각 학습 파라미터에 대한 그래디언트를 계산해야 한다.
- 이것은 가능하지만, 수작업 계산량(manual computation)이 너무 많다는 문제가 있다.
p30. 계산 그래프
- 계산 그래프(computation graph) 는 방향성이 있는 비순환 그래프(directed acyclic graph)로서,
루트 노드는 최종 수학적 표현을 나타내고, 각 내부 노드는 중간 부분식을 나타낸다.
계산 그래프를 사용하면, 역전파 알고리즘(backpropagation algorithm) 을 통해
그래디언트를 효율적으로 계산할 수 있다.PyTorch 같은 프레임워크는 이 과정을 자동으로 처리하지만,
어떻게 작동하는지를 이해하는 것은 중요하다.
p31. 계산 그래프: 모듈 박스로서의 함수
하나의 함수를 박스(box) 로 생각해 보자.
이 박스는 입력들의 집합을 받아서 출력을 계산한다.편미분(partial derivative) 은 각 입력에서 출력으로 연결되는 엣지(edge) 위에 표시된다.
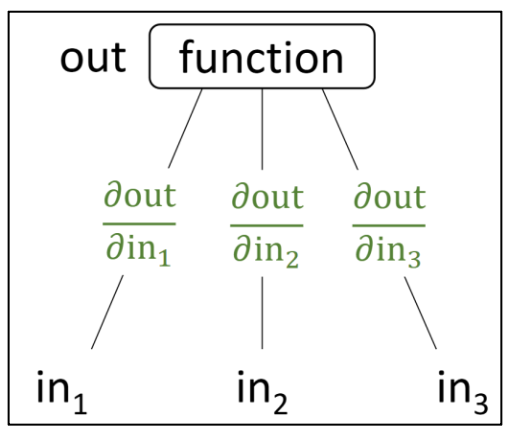
- 편미분(gradient) 은 출력이 각 입력의 변화에 얼마나 민감한지를 정량화한다.
- 예시 (Example):
$in_2$ 에 $\epsilon$ 만큼 작은 변화를 주면:
\[\Rightarrow 2in_1 + (in_2 + \epsilon) in_3 = out + in_3 \epsilon\]즉, 출력이 $in_3 \epsilon$ 만큼 변한다.
이는 다음 편미분에 해당한다:
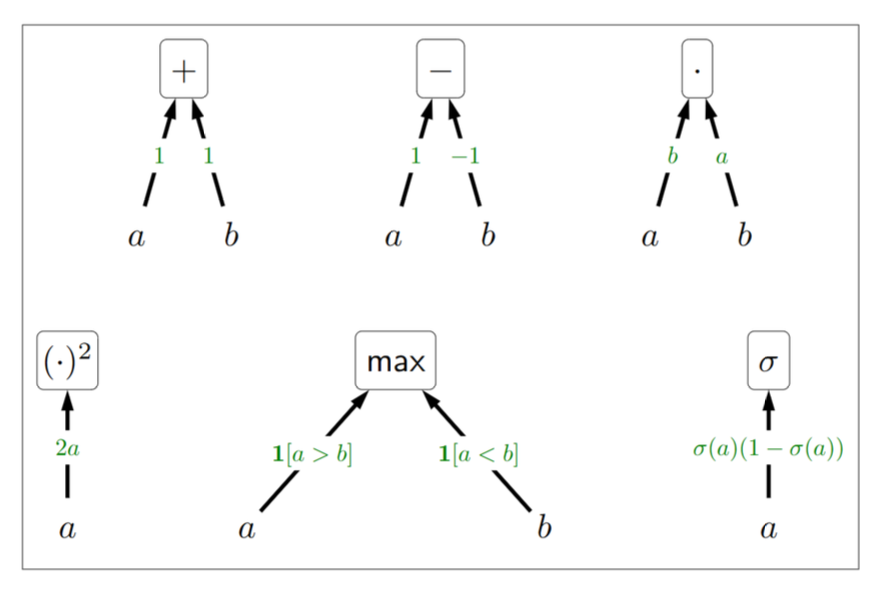
p32. 계산 그래프: 기본 빌딩 블록
- 다음은 간단한 함수 다섯 가지와 그 편미분(partial derivatives) 예시이다.
- 덧셈 ($a + b$)
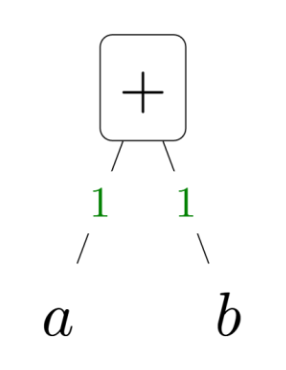
- 입력: a, b
- 출력: a + b
- 편미분:
- $\frac{\partial}{\partial a}(a+b) = 1$
- $\frac{\partial}{\partial b}(a+b) = 1$
- 뺄셈 ($a - b$)

- 입력: a, b
- 출력: a - b
- 편미분:
- $\frac{\partial}{\partial a}(a-b) = 1$
- $\frac{\partial}{\partial b}(a-b) = -1$
- 곱셈 ($a \cdot b$)
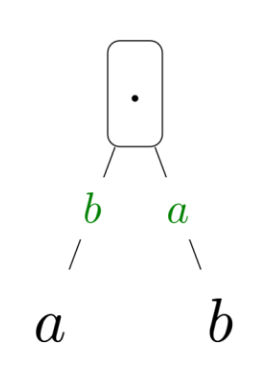
- 입력: a, b
- 출력: $a \cdot b$
- 편미분:
- $\frac{\partial}{\partial a}(ab) = b$
- $\frac{\partial}{\partial b}(ab) = a$
- 최대값 ($max(a, b)$)
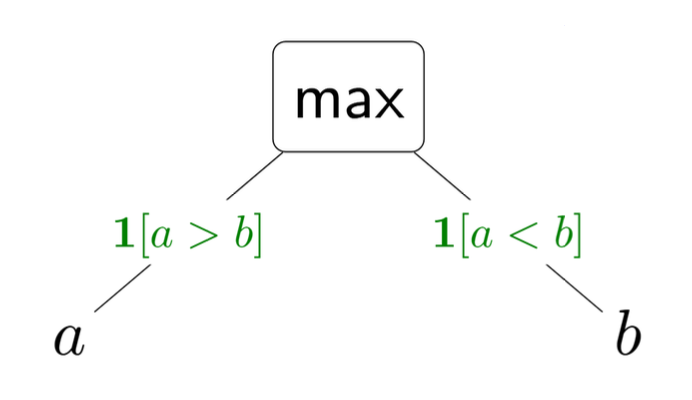
- 입력: a, b
- 출력: $\max(a, b)$
- 편미분:
- $\frac{\partial}{\partial a}(\max(a, b)) = 1[a > b]$ (a가 b보다 클 때 1, 그렇지 않으면 0)
- $\frac{\partial}{\partial b}(\max(a, b)) = 1[a < b]$ (b가 a보다 클 때 1, 그렇지 않으면 0)
- 시그모이드 함수 (Sigmoid function)
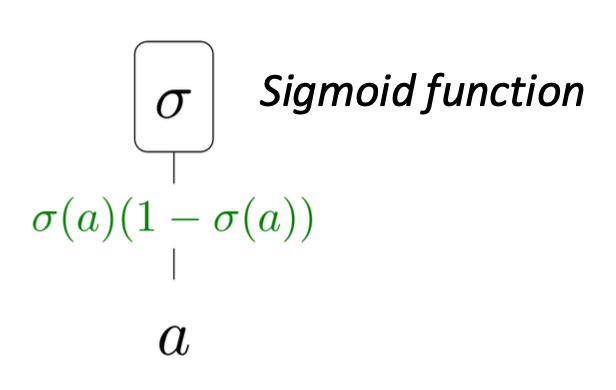
- 입력: a
- 출력: $\sigma(a)$
- 편미분:
- $\frac{\partial}{\partial a}(\sigma(a)) = \sigma(a)(1 - \sigma(a))$
1. 시그모이드 정의
시그모이드는
\[\sigma(a)=\frac{1}{1+e^{-a}}\]로 정의한다.
2. 분수 미분 공식으로 단계별 미분
분수 미분 공식(quotient rule):
\[\left(\frac{u}{v}\right)'=\frac{u'v-u\,v'}{v^2}\]여기서 $u(a)=1,\; v(a)=1+e^{-a}$.
\[u'(a)=0,\qquad v'(a)=-e^{-a}\]공식을 대입하면
\[\frac{d\sigma(a)}{da} =\frac{0\cdot(1+e^{-a})-1\cdot(-e^{-a})}{(1+e^{-a})^2} =\frac{e^{-a}}{(1+e^{-a})^2}.\]3. 거듭제곱–연쇄 규칙으로도 같은 결과
$\sigma(a)=(1+e^{-a})^{-1}$ 로 보고 미분하면
\[\frac{d\sigma(a)}{da} =-1\cdot(1+e^{-a})^{-2}\cdot(-e^{-a}) =\frac{e^{-a}}{(1+e^{-a})^2}.\]4. 최종 정리: $\sigma(a)(1-\sigma(a))$ 꼴로 변형
\[\sigma(a)=\frac{1}{1+e^{-a}},\qquad 1-\sigma(a)=\frac{e^{-a}}{1+e^{-a}}\]
1)2)
\[\sigma(a)(1-\sigma(a)) =\frac{1}{1+e^{-a}}\cdot\frac{e^{-a}}{1+e^{-a}} =\frac{e^{-a}}{(1+e^{-a})^2}.\]3) 위 결과가 $\dfrac{d\sigma(a)}{da}$ 와 동일하므로
\[\boxed{\frac{d\sigma(a)}{da}=\sigma(a)(1-\sigma(a))}\]
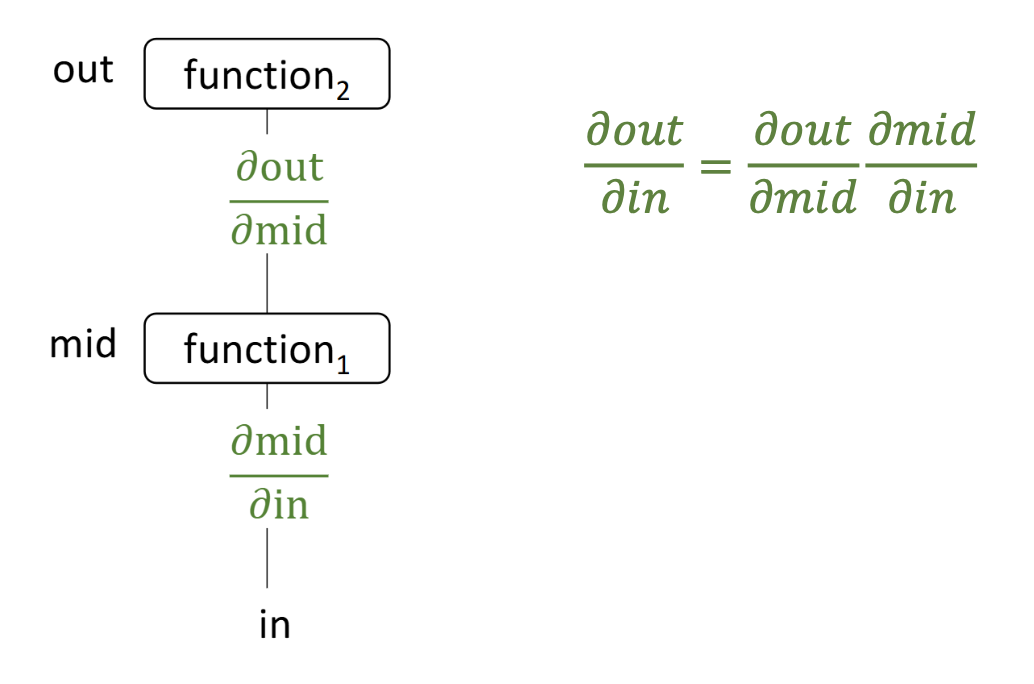
p33. 계산 그래프: 함수의 합성 (Composing functions)
이러한 기본 블록들을 사용하여, 연쇄 법칙(chain rule)을 통해 체계적으로 도함수(derivatives)를 계산하면서 더 복잡한 함수를 만들 수 있다.
연쇄 법칙(Chain rule):
출력(out)의 입력(in)에 대한 도함수는, 연산 그래프에서 경로를 따라 나타나는 중간 도함수들을 곱함으로써 얻어진다.
p34. 예시: 힌지 손실(Hinge loss)을 사용한 선형 분류
손실 함수는 다음과 같이 주어진다:
\[\text{Loss}(x, y, \mathbf{w}) = \max \{1 - (\mathbf{w} \cdot \varphi(x))y, \; 0 \}\]연산 그래프(computation graph)는 다음과 같이 구성할 수 있다.
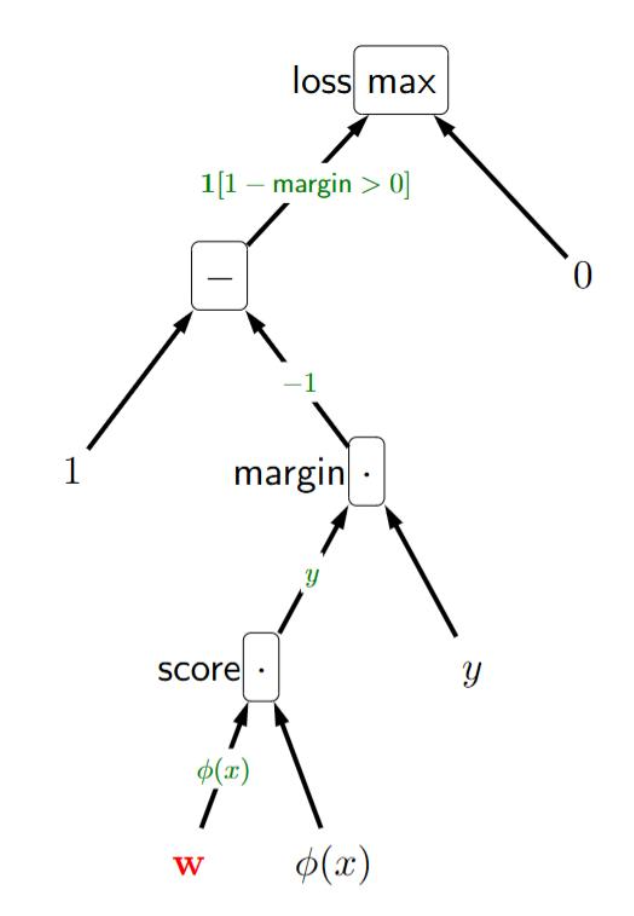
연쇄 법칙(chain rule)을 적용하면, 그래디언트는 다음과 같이 계산된다:
\[\nabla_{\mathbf{w}} \, \text{Loss}(x, y, \mathbf{w}) = (1[\text{margin} < 1])(-1)(y)(\varphi(x))\] \[= -\varphi(x) y \; 1[\text{margin} < 1]\]
1. 순전파 (Forward)
1) 점수 (score)
$s = \mathbf{w} \cdot \varphi(x)$2) 마진 (margin)
$m = y \cdot s$3) 잔차 (residual)
$r = 1 - m$4) 손실 (loss)
$L = \max(r, 0)$
- $r \le 0 \Rightarrow L = 0$ (마진 충분)
- $r > 0 \Rightarrow L = r$ (마진 부족 또는 오분류)
2. 역전파 (Backward: 단계별 편미분)
① 손실 노드 $L = \max(r,0)$ 의 $r$에 대한 편미분
- $r>0$ 일 때:
\(\frac{\partial L}{\partial r} = 1\)- $r \le 0$ 일 때:
\(\frac{\partial L}{\partial r} = 0\)- 요약:
\(\frac{\partial L}{\partial r} = 1[r>0]\)② 잔차 노드 $r = 1 - m$ 의 $m$에 대한 편미분
\(\frac{\partial r}{\partial m} = -1\)③ 마진 노드 $m = y \cdot s$ 의 편미분
- $s$ 에 대해:
\(\frac{\partial m}{\partial s} = y\)- $y$ 에 대해:
\(\frac{\partial m}{\partial y} = s\)④ 점수 노드 $s = \mathbf{w} \cdot \varphi(x)$ 의 편미분
- $\mathbf{w}$ 에 대해:
\(\frac{\partial s}{\partial \mathbf{w}} = \varphi(x)\)- $\varphi(x)$ 에 대해:
\(\frac{\partial s}{\partial \varphi(x)} = \mathbf{w}\)3. 최종 그래디언트 (체인 룰 적용)
가중치 $\mathbf{w}$ 에 대한 그래디언트
\[\nabla_{\mathbf{w}} L = \frac{\partial L}{\partial r} \cdot \frac{\partial r}{\partial m} \cdot \frac{\partial m}{\partial s} \cdot \frac{\partial s}{\partial \mathbf{w}}\] \[= 1[r>0] \cdot (-1) \cdot y \cdot \varphi(x) = -\varphi(x)\, y \, 1[r>0]\]
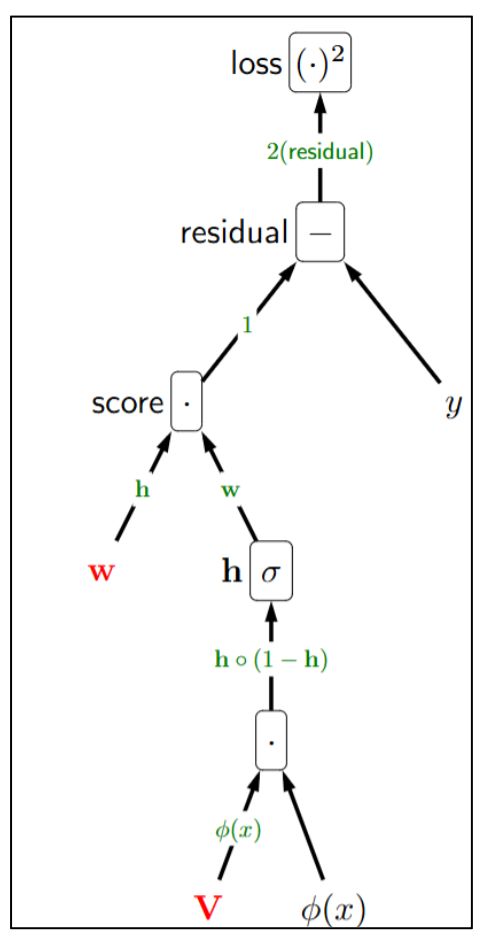
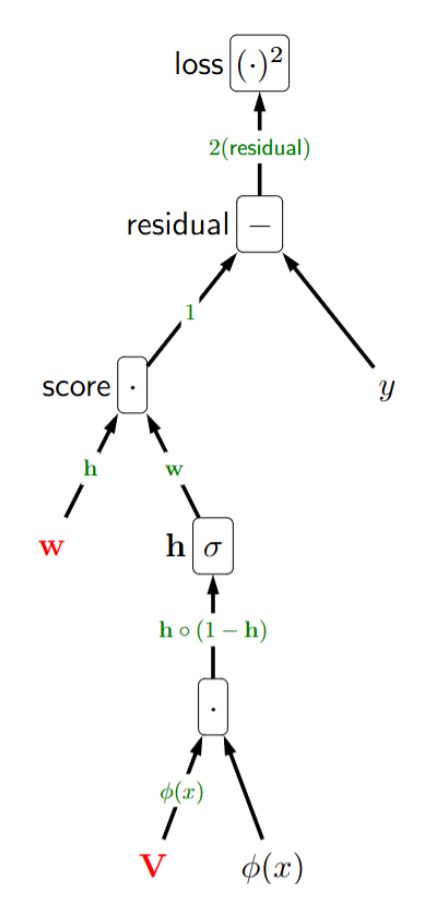
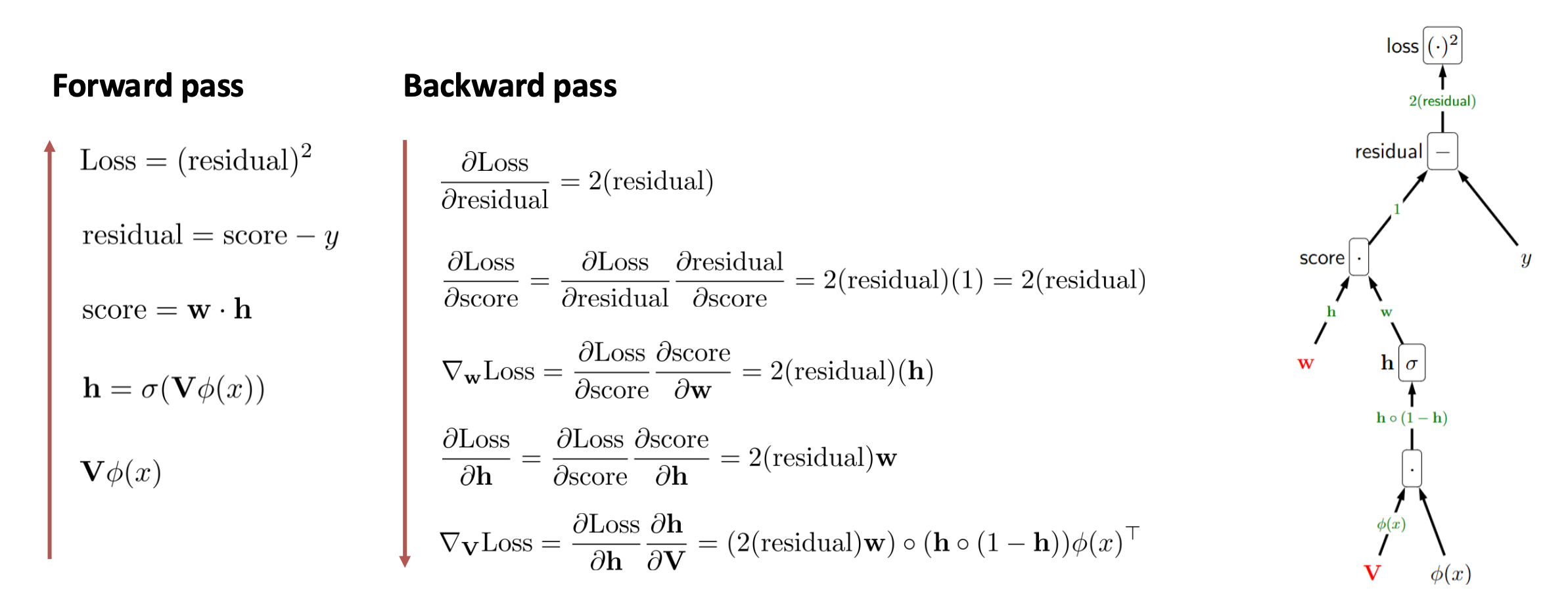
p35. 예시: 이층(two-layer) 신경망을 사용한 회귀
- 손실 함수는 다음과 같이 주어진다:
- 계산 그래프(computation graph)는 다음과 같이 구성할 수 있다.
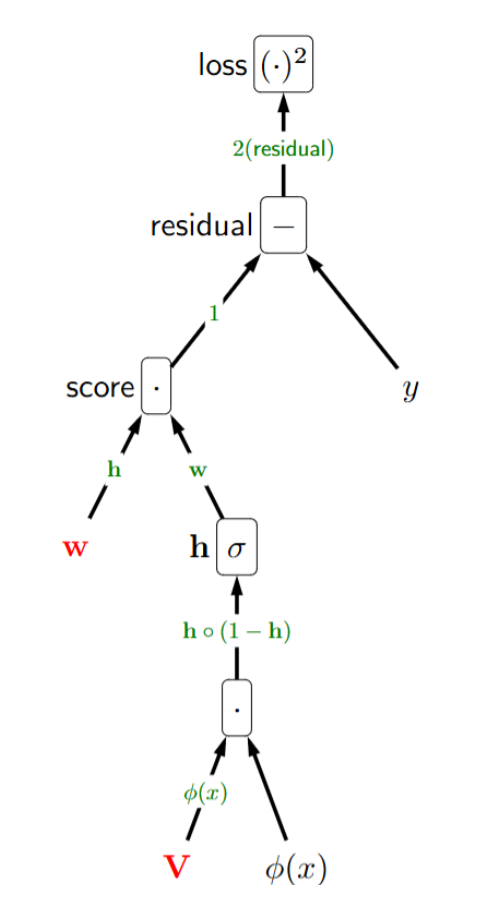
- 연쇄 법칙(chain rule)을 적용하면, 그래디언트는 다음과 같이 계산된다:
- 주의:
$\circ$ 는 원소별(elementwise) 곱셈을 의미한다. 이는 활성화 함수(activation) 가 각 원소에 독립적으로 적용되기 때문에 필요하다.
Shape (행렬/벡터의 차원)
- $\mathbf{w}$ : $k \times 1$
- $\mathbf{h}$ : $k \times 1$
- $\mathbf{V}$ : $k \times d$
- $\varphi(x)$ : $d \times 1$
- $\mathbf{w} \cdot \mathbf{h} = \mathbf{w}^\top \mathbf{h}$
1. 순전파 (Forward)
1) 은닉층 입력
$z = \mathbf{V} \varphi(x)$2) 은닉층 활성화
$\mathbf{h} = \sigma(z)$3) 출력 (예측값)
$\hat{y} = \mathbf{w} \cdot \mathbf{h}$4) 잔차 (residual)
$r = \hat{y} - y$5) 손실 (loss)
$L = r^2 = (\hat{y} - y)^2$2. 역전파 (Backward: 단계별 편미분)
① 손실 노드 $L = r^2$ 의 $r$에 대한 편미분
\(\frac{\partial L}{\partial r} = 2r\)② 잔차 노드 $r = \hat{y} - y$
- $\hat{y}$ 에 대해
\(\frac{\partial r}{\partial \hat{y}} = 1\)- $y$ 에 대해
\(\frac{\partial r}{\partial y} = -1\)③ 출력 노드 $\hat{y} = \mathbf{w} \cdot \mathbf{h}$
- $\mathbf{w}$ 에 대해
\(\frac{\partial \hat{y}}{\partial \mathbf{w}} = \mathbf{h}\)- $\mathbf{h}$ 에 대해
\(\frac{\partial \hat{y}}{\partial \mathbf{h}} = \mathbf{w}\)④ 은닉층 노드 $\mathbf{h} = \sigma(z)$
\(\frac{\partial \mathbf{h}}{\partial z} = \mathbf{h} \circ (1 - \mathbf{h})\)⑤ 은닉층 입력 $z = \mathbf{V}\varphi(x)$
- $\mathbf{V}$ 에 대해
\(\frac{\partial z}{\partial \mathbf{V}} = \varphi(x)^\top\)- $\varphi(x)$ 에 대해
\(\frac{\partial z}{\partial \varphi(x)} = \mathbf{V}\)3. 최종 그래디언트 (체인 룰 적용)
가중치 $\mathbf{w}$ 에 대한 그래디언트
\(\nabla_{\mathbf{w}} L = (2r)\cdot(1)\cdot \mathbf{h} = 2r\,\mathbf{h}\)가중치 $\mathbf{V}$ 에 대한 그래디언트
\(\nabla_{\mathbf{V}} L = (2r)\cdot(1)\cdot \mathbf{w}\cdot (\mathbf{h}\circ(1-\mathbf{h}))\cdot \varphi(x)^\top\)추가 보충 설명: 왜 미분하면 전치가 나타나는가?
1) 형상(Shape) 확인
- $\mathbf{V}$ : $(k \times d)$
- $\varphi(x)$ : $(d \times 1)$
- 따라서 $z=\mathbf{V}\varphi(x)\in\mathbb{R}^{k\times 1}$
2) $z$의 $i$번째 원소
\[z_i = \sum_{j=1}^d V_{ij}\,\varphi_j(x) = \mathbf{V}_{i,:}\cdot \varphi(x)\]3) $i$행에 대한 미분
\[\frac{\partial z_i}{\partial \mathbf{V}_{i,:}} = [\varphi_1(x),\dots,\varphi_d(x)] = \varphi(x)^\top\]→ 특정 행에 대한 그래디언트가 행벡터 = $\varphi(x)^\top$ 로 나타난다.
4) 전체 $\mathbf{V}$ 에 대한 미분
\[\frac{\partial z}{\partial \mathbf{V}} = \begin{bmatrix} \varphi(x)^\top \\ \varphi(x)^\top \\ \vdots \\ \varphi(x)^\top \end{bmatrix}_{k\times d}\]즉, 모든 행이 동일하게 $\varphi(x)^\top$ 로 구성된 행렬이 된다.
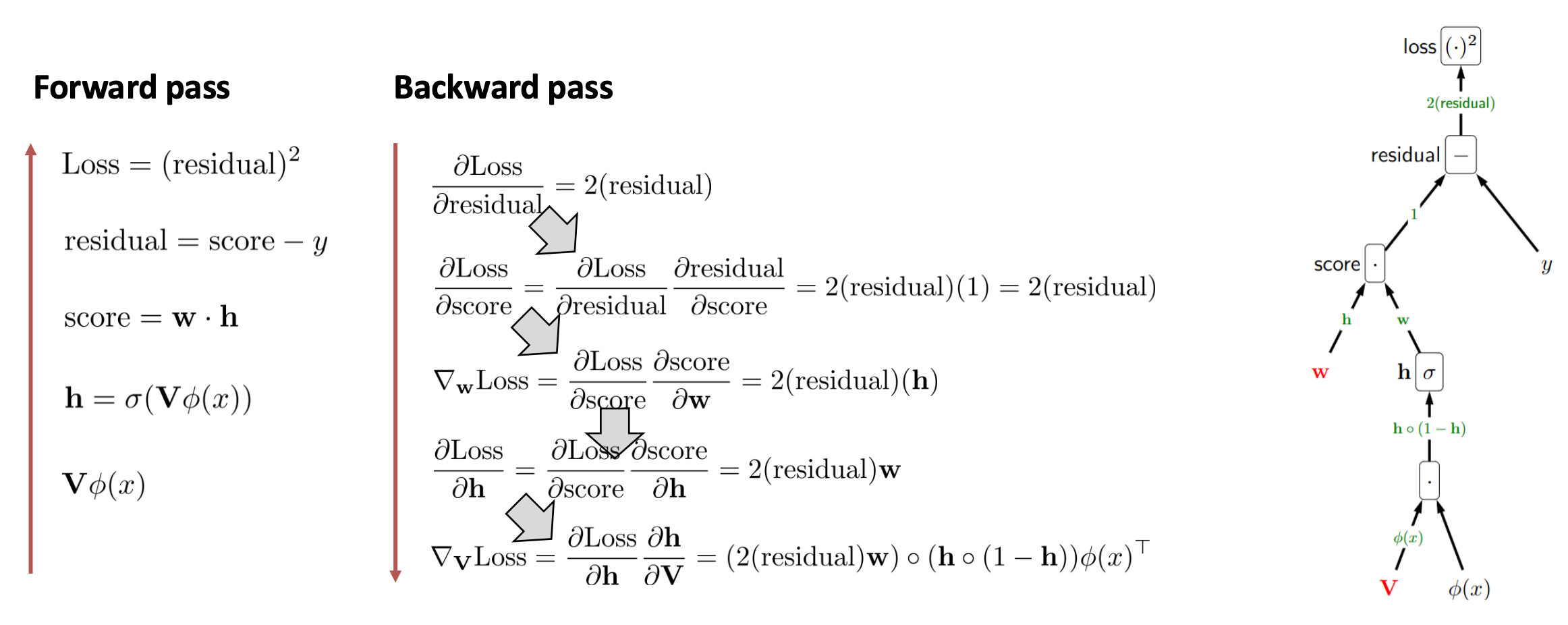
p36. 역전파를 통한 최적화
- 역전파는 그래디언트 계산 알고리즘으로,
출력층에서 발생한 오차 신호를 이전 층으로 거슬러 올라가며 전파한다. - 이는 연쇄 법칙에 기반하여, 불필요한 중복 계산을 피할 수 있도록 한다.
💻 알고리즘
- 순전파:
- 각 노드에 대해 (리프 → 루트) 방향으로 순전파 값을 계산한다.
- 역전파:
- 각 노드에 대해 (루트 → 리프) 방향으로 역전파 값을 계산한다.
p37. 역전파를 통한 최적화
- 역전파(Backpropagation) 는 그래디언트 계산 알고리즘으로,
출력층에서 이전 층으로 오차 신호를 거꾸로 전파한다. - 이는 연쇄 법칙(chain rule) 에 기반하며, 중복 계산을 피하기 위해 사용된다.
p38. 역전파를 통한 최적화
- 역전파(Backpropagation) 는 그래디언트 계산 알고리즘으로,
출력층에서 이전 층으로 오차 신호를 거꾸로 전파한다. - 이는 연쇄 법칙(chain rule) 에 기반하며, 중복 계산을 피하기 위해 사용된다.
p39. 역전파를 통한 최적화
역전파를 사용하여 그래디언트를 계산하면,
경사하강법(gradient descent) 을 적용하여 모델 파라미터를 반복적으로 업데이트한다.목표는 학습 데이터에서의 손실을 최소화하는 것이다:
💻 알고리즘 (Algorithm: SGD)
- $\mathbf{w}, \mathbf{V}$ 를 무작위로 초기화한다.
- 수렴할 때까지 반복한다:
무작위로 선택된 $(x, y) \in D_{train}$ 에 대해
\[\mathbf{w} \;\leftarrow\; \mathbf{w} - \eta \, (2 \cdot \text{residual}) \, \mathbf{h}\] \[\mathbf{V} \;\leftarrow\; \mathbf{V} - \eta \, (2 \cdot \text{residual}) \, \mathbf{w} \circ \mathbf{h} \circ (1-\mathbf{h}) \, \varphi(x)^\top\]
- 여기서 $\eta$ (학습률, learning rate)는 하이퍼파라미터(hyperparameter) 로, 한 번의 업데이트에서 이동하는 크기를 결정한다.
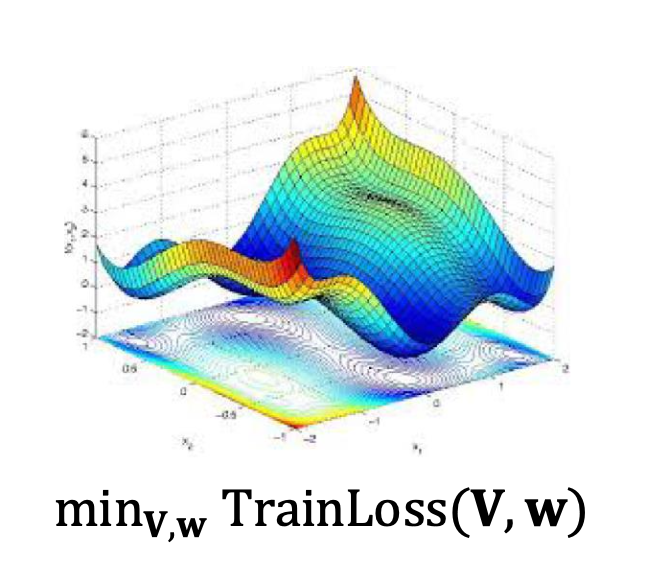
p40. 신경망 최적화는 어려울 수 있다
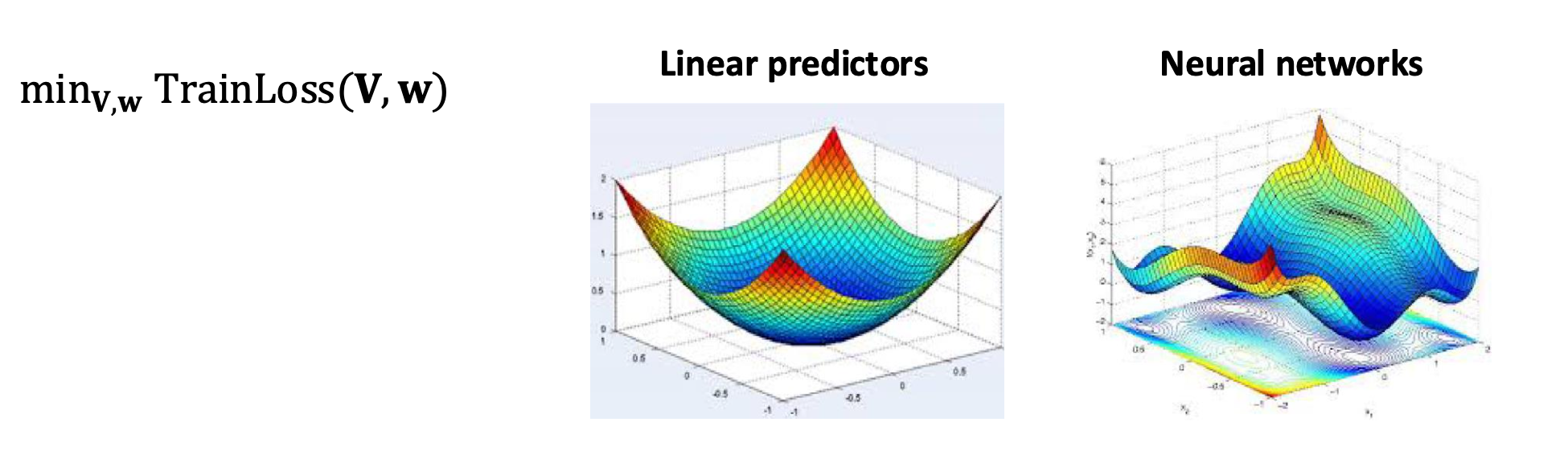
- 선형 예측기의 경우, 손실 함수는 볼록(convex)이다.
- 이는 단일 전역 최소값(global minimum)을 가진다는 의미이다.
- 따라서 적절하게 선택된 학습률(step size)을 사용하면 SGD가 최적해로 수렴한다.
- 신경망의 경우, 손실 함수는 비볼록(non-convex)이다.
- 이는 여러 개의 지역 최적해(local optima)가 존재한다는 의미이다.
- 그 결과 SGD는 차선의 해(suboptimal solution)에 수렴할 수 있으며, 성능은 초기화(initialization)와 학습률에 크게 의존한다.
1. 다층 구조로 인한 비선형성
- 선형 예측기는 입력과 출력 사이의 관계가 단일 선형 결합으로 표현된다.
- 반면 신경망은 여러 개의 은닉층을 거치며 각 층에서 새로운 표현을 만든다.
- 이 과정에서 입력이 여러 차례 비선형 변환을 거치므로 손실 함수의 형태는 단순한 볼록 함수가 아니라 복잡한 비볼록 함수가 된다.
2. 활성화 함수의 영향
- 시그모이드(sigmoid), ReLU 등의 활성화 함수는 모델에 비선형성을 부여한다.
- 이러한 함수의 곡선적 성질 때문에 매개변수 공간에서 손실 함수는 매끄럽지 않고 복잡한 지형을 갖는다.
- 그 결과, 여러 개의 지역 최적해나 안장점(saddle points)이 자연스럽게 나타난다.
3. 매개변수 공간의 고차원성
- 신경망은 수천, 수만 개 이상의 가중치와 편향을 포함하는 고차원 매개변수 공간을 가진다.
- 차원이 높아질수록 손실 함수의 표면은 더욱 복잡해지며, 직관적인 볼록성을 유지하기 어렵다.
- 이 때문에 최적화 과정에서 SGD 같은 기법이 전역 최소값보다 지역 최소값이나 평평한 구간에 머물 가능성이 크다.
4. 요약
- 신경망의 손실 함수가 복잡한 이유는
1) 다층 구조로 인한 반복적 비선형 변환,
2) 활성화 함수가 만들어내는 곡선적 특성,
3) 매개변수 공간의 높은 차원성
때문이다.- 이 세 요소가 결합되면서 손실 함수는 자연스럽게 비볼록(non-convex) 형태를 띠게 된다.
p41. 요약 (Summary)
신경망 (Neural networks):
사람이 직접 $\varphi(x)$를 설계하는 대신, 복잡한 변환을 자동으로 학습한다.계산 그래프 (Computation graphs):
그래디언트를 시각화하고 이해할 수 있게 한다.역전파 (Backpropagation):
그래디언트를 계산하기 위한 범용 알고리즘으로 사용된다.